
¿Te gustaría hacer tu propio robot BB-8 con materiales caseros? Aquí encontrarás cómo, sin demasiados conocimientos ni experiencia sobre robótica y con materiales caseros y accesibles vamos a construir nuestro robot BB-8. Sin impresoras 3D. Lo podrás hacer radiocontrol o incluso controlado por WiFi a través de una placa Arduino YUN. ¿Te atreves a intentarlo?
jueves, 2 de febrero de 2017
miércoles, 1 de febrero de 2017
V3.0 Control Principal
Vídeo explicativo con el control principal, basado en Arduino YUN, de BB-8 casero:
domingo, 23 de octubre de 2016
Seguimos trabajando DIY BB8 casero
Sigo trabajando en la V3 definitiva de BB8. Ya va quedando menos, pero últimamente no dispongo de todo el tiempo que quisiera y vamos a tener que gastar paciencia hasta verla terminada.
Mi última decisión es hacer una nueva cabeza desde 0, ya que el peso de la actual, que tan solo pesa 432 gramos, es demasiado y fuerza que el robot interno deba pesar demasiado... volviéndose todo demasiado complicado. El poliestileno es mi nuevo amigo, a ver cómo queda.
Publico estas fotos con medidas del robot tal como está ahora mismo para ayudar a Miguel Ramos. Desde aquí le mandamos todos los ánimos para su proyecto BB8:






No descarto cambios en el robot base para ajustar a la nueva cabeza, de hecho lo más probable es que los haga.
Seguimos trabajando y disfrutando de DIY BB8!!!!
Mi última decisión es hacer una nueva cabeza desde 0, ya que el peso de la actual, que tan solo pesa 432 gramos, es demasiado y fuerza que el robot interno deba pesar demasiado... volviéndose todo demasiado complicado. El poliestileno es mi nuevo amigo, a ver cómo queda.
Publico estas fotos con medidas del robot tal como está ahora mismo para ayudar a Miguel Ramos. Desde aquí le mandamos todos los ánimos para su proyecto BB8:






No descarto cambios en el robot base para ajustar a la nueva cabeza, de hecho lo más probable es que los haga.
Seguimos trabajando y disfrutando de DIY BB8!!!!
sábado, 25 de junio de 2016
A por la versión definitiva de BB-8
Tras pensar las mejoras necesarias e imaginadas para la versión 3.0 de BB-8 casero, y conseguir los materiales que nos van a hacer falta hoy he desmontado completamente el robot interno para rearmarlo con todas ellas:


Mejoras propuestas para esta versión:
Mejora estética "ensuciando" a BB-8 para que se parezca más al original.
Incorporación de nuevos rodamientos unidireccionales, las bolas rol-on de botes de desodorantes (Gracias a Jesus Ossorio por la recomendación) de gran tamaño que espero mejore la fluidez del movimiento del robot y de la cabeza.
Sustitución de la batería que está achicharrada (por cargarla incorrectamente) y de paso conseguir un cargador adecuado.
Incorporación de una pequeña fuente de alimentación para reducir los 12V de la batería a 5V, y así poder alimentar la Arduino YUN directamente desde ella.
Incorporación de un servomotor que permita el giro de la cabeza.
Incorporación de un giróscopo para evitar el balanceo del robot al moverse fabricado con un disco duro estropeado.
Luces tanto en bola cuerpo como en la cabeza y los sonidos de BB-8.
Sistema de cargado de batería sin necesidad de abrir la bola cuerpo a través de un "orificio" [esto está aún en estudio... todavía no sé cómo lo voy a hacer].
Interruptor magnético para poder apagar el robot sin tener que abrirlo.
Espero contar con tiempo este verano para afrontar estos cambios y poder tener andando a BB-8 cuanto antes , - ) ¡¡estoy deseando verlo funcionar!!!


Mejoras propuestas para esta versión:
Mejora estética "ensuciando" a BB-8 para que se parezca más al original.
Incorporación de nuevos rodamientos unidireccionales, las bolas rol-on de botes de desodorantes (Gracias a Jesus Ossorio por la recomendación) de gran tamaño que espero mejore la fluidez del movimiento del robot y de la cabeza.
Sustitución de la batería que está achicharrada (por cargarla incorrectamente) y de paso conseguir un cargador adecuado.
Incorporación de una pequeña fuente de alimentación para reducir los 12V de la batería a 5V, y así poder alimentar la Arduino YUN directamente desde ella.
Incorporación de un servomotor que permita el giro de la cabeza.
Incorporación de un giróscopo para evitar el balanceo del robot al moverse fabricado con un disco duro estropeado.
Luces tanto en bola cuerpo como en la cabeza y los sonidos de BB-8.
Sistema de cargado de batería sin necesidad de abrir la bola cuerpo a través de un "orificio" [esto está aún en estudio... todavía no sé cómo lo voy a hacer].
Interruptor magnético para poder apagar el robot sin tener que abrirlo.
Espero contar con tiempo este verano para afrontar estos cambios y poder tener andando a BB-8 cuanto antes , - ) ¡¡estoy deseando verlo funcionar!!!
martes, 5 de abril de 2016
Esquema electrónico de BB-8 casero V2.2
Este es el esquema electrónico del montaje utilizado en la versión 2.2 de BB-8 casero:

El esquema está hecho utilizando fritzing, y puedes descargar el esquema desde aquí.
El controlador de motores (y algunos otros detalles) no es exactamente el mostrado en el esquema, pero es básicamente lo mismo.
Aquí algunas fotos detalle del robot ahora mismo. Hay algún cambio de la versión 3.0, que incluye giro de la cabeza y luces:











El esquema está hecho utilizando fritzing, y puedes descargar el esquema desde aquí.
El controlador de motores (y algunos otros detalles) no es exactamente el mostrado en el esquema, pero es básicamente lo mismo.
Aquí algunas fotos detalle del robot ahora mismo. Hay algún cambio de la versión 3.0, que incluye giro de la cabeza y luces:










lunes, 14 de marzo de 2016
Poniendo luces a BB-8 casero
Una de las cosas que lucen mucho en un robot son las luces , - ) y BB-8 cuenta con las suyas, tanto en la cabeza como en la bola cuerpo.
Para nuestra versión 3.0 BB-8 casero contará con luces y aquí dejamos alguna imagen de cómo va yendo:















Para nuestra versión 3.0 BB-8 casero contará con luces y aquí dejamos alguna imagen de cómo va yendo:















jueves, 3 de marzo de 2016
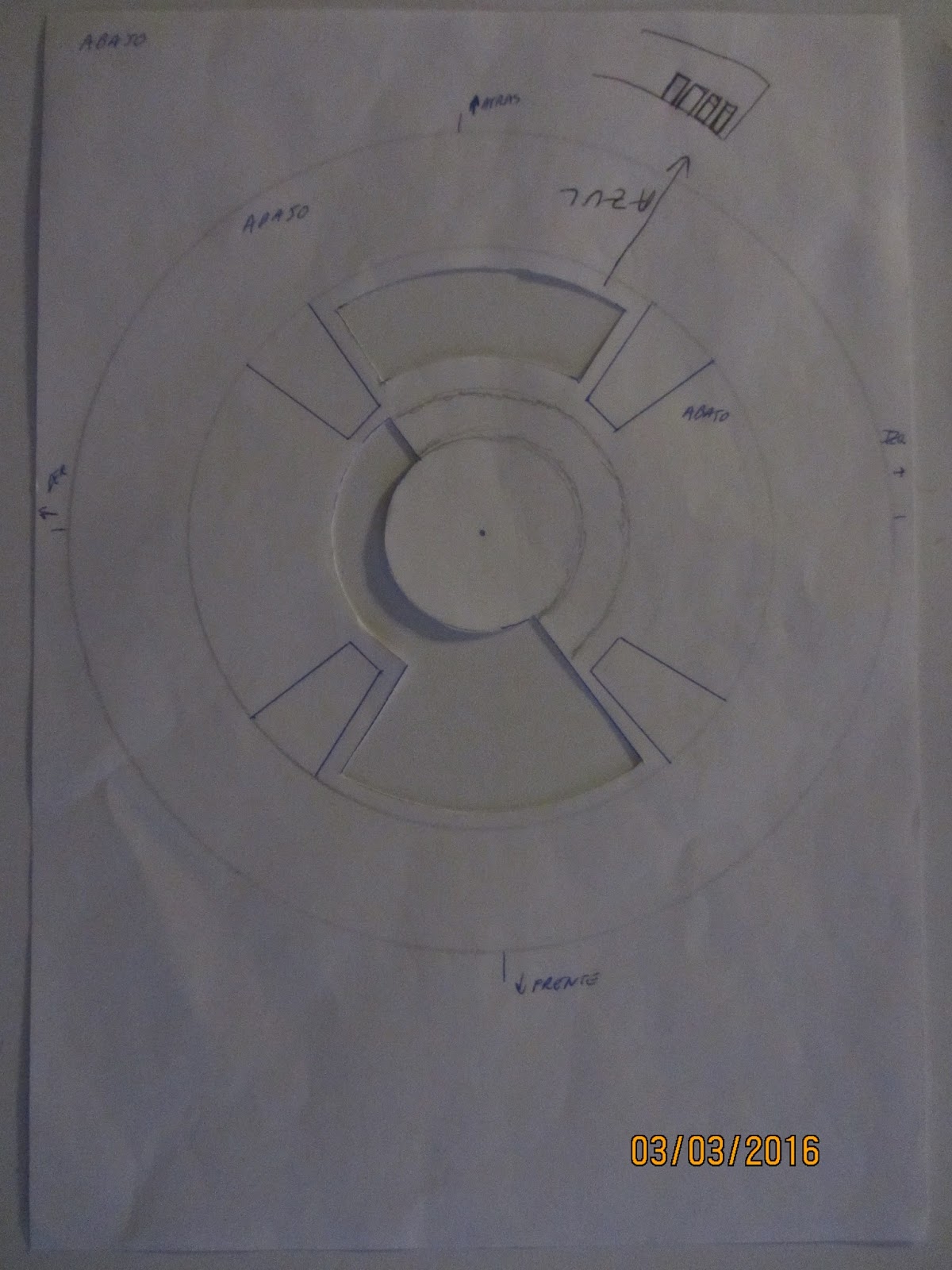
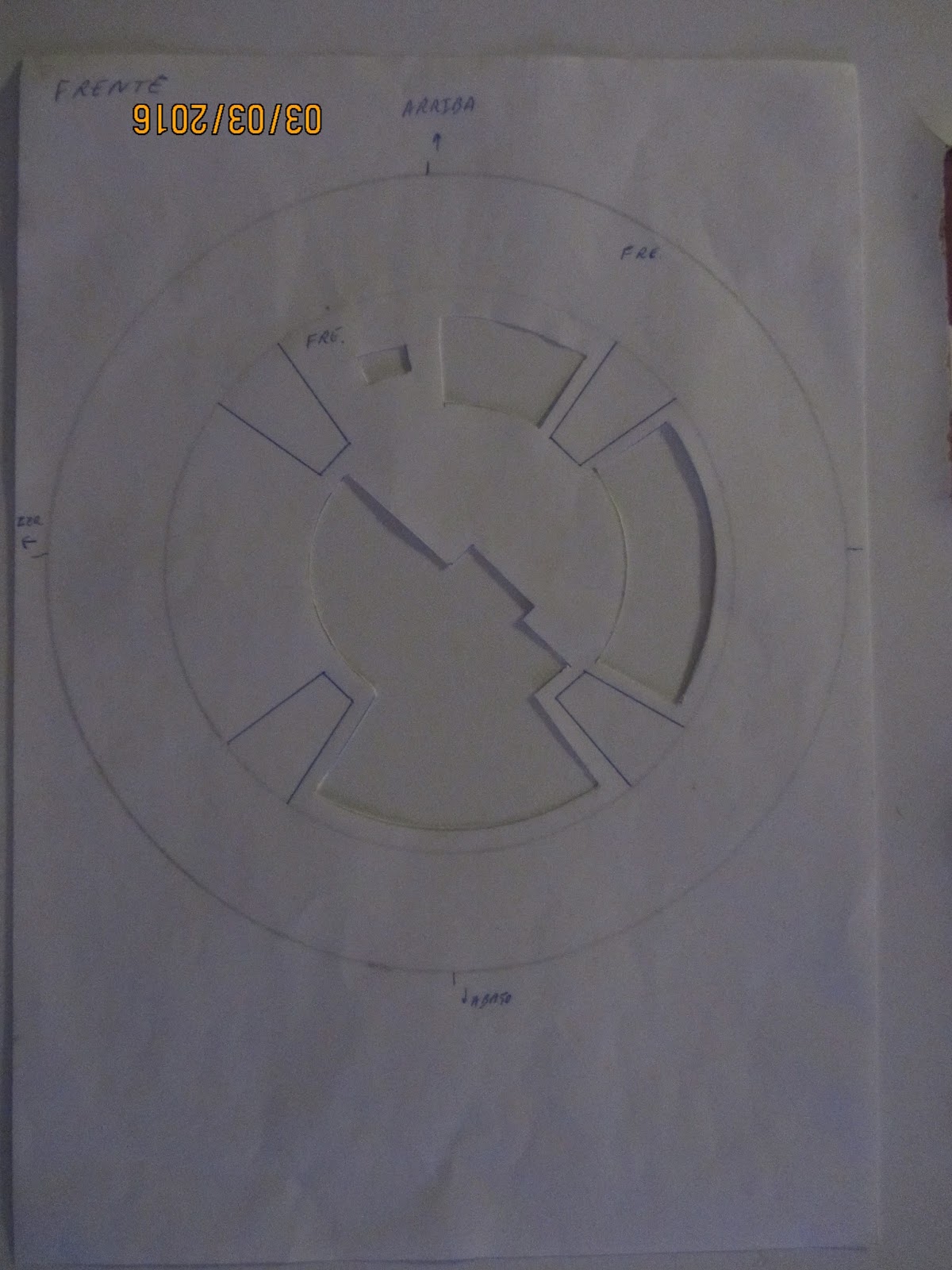
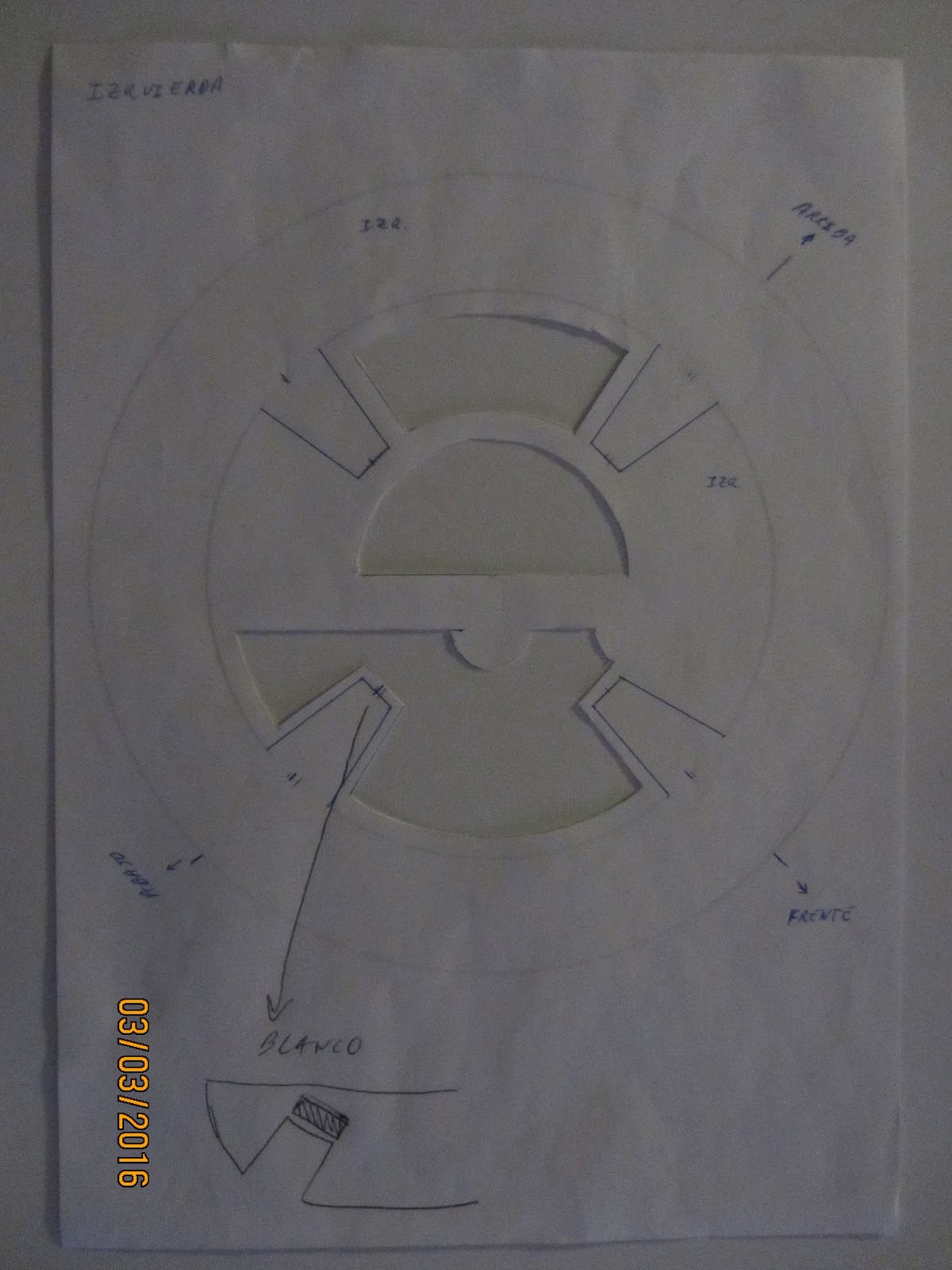
Plantillas BB-8
Estas son las plantillas utilizadas en su día para la pintura de la bola cuerpo de BB-8 casero.
Hice esta plantilla a base de fijarme en las imágenes que en su día estaban disponibles del robot, y haciendo cálculos con respecto a al cuerpo de mi robot que es de 35cm de diámetro (el original es bastante más grande, por lo que para usar estas plantillas para robots de tamaño original se han de aumentar las dimensiones proporcionalmente):

Las demás plantillas quedaron así:






Se pueden descargar las fotos originales desde aquí (dropbox), y también los intentos de escanearlas (las líneas son tan finas que no salen en el escaner)
Que la fuerza os acompañe!!!!
Hice esta plantilla a base de fijarme en las imágenes que en su día estaban disponibles del robot, y haciendo cálculos con respecto a al cuerpo de mi robot que es de 35cm de diámetro (el original es bastante más grande, por lo que para usar estas plantillas para robots de tamaño original se han de aumentar las dimensiones proporcionalmente):

Las demás plantillas quedaron así:



Se pueden descargar las fotos originales desde aquí (dropbox), y también los intentos de escanearlas (las líneas son tan finas que no salen en el escaner)
Que la fuerza os acompañe!!!!
domingo, 28 de febrero de 2016
Comunicaciones WiFi para telepresencia con BB-8 casero
Este sería el esquema de las comunicaciones que hemos configurado para poder acceder a BB-8 desde cualquier parte del mundo, convirtiéndose en un robot telepresencia:
 Desde cualquier PC del mundo, vía teamviewer se puede conectar (En rojo) a través de internet a nuestro PC de casa. Desde él, y por la red local accederemos por web tanto a la tarjeta Arduino YUN para controlar el movimiento del robot y las luces del mismo, como al móvil que va en la cabeza (vía airdroid) para acceder a su cámara, a reproducir los sonidos originales de BB-8 o incluso localizarlo por GPS.
Desde cualquier PC del mundo, vía teamviewer se puede conectar (En rojo) a través de internet a nuestro PC de casa. Desde él, y por la red local accederemos por web tanto a la tarjeta Arduino YUN para controlar el movimiento del robot y las luces del mismo, como al móvil que va en la cabeza (vía airdroid) para acceder a su cámara, a reproducir los sonidos originales de BB-8 o incluso localizarlo por GPS.
También podremos acceder desde móviles o tablets que estén en la red local a la que se conecte BB-8.
Las mejoras y aplicaciones tanto del móvil en la cabeza como de la tarjeta Arduino son muy amplias!!

También podremos acceder desde móviles o tablets que estén en la red local a la que se conecte BB-8.
Las mejoras y aplicaciones tanto del móvil en la cabeza como de la tarjeta Arduino son muy amplias!!
lunes, 15 de febrero de 2016
Lista de materiales Star Wars BB-8 casero
Esta es la lista de materiales utilizados para la construcción de BB-8 casero, hoy por hoy en la versión 2.0

Imprescindibles:
- Globo terráqueo de 32cm de diámetro
- Globo terráqueo de 20cm de diámetro
- 2 x Motor: DC 37mm 50RPM, Voltaje nominal: 12V (Rango de Voltaje: 4,5V-15V) Velocidad nominal: 40 rpm Corriente nominal: 0,3 A Par nominal: 4,5 kg.cm
- Batería: batería de plomo 12V / 2,2AH dimensiones: 178 x 34 x 60mm
- 2 x Imanes: iman de neodimio - ANILLO Ø30 - Ø6 x 6 mm - N40 [Podrías utilizar reciclados de discos duros o de altavoces] [Para la versión 3.0 que moverá la cabeza harán falta 6]
- Control para el robot:
· Para versión radiocontrol: Un juguete radiocontrol al que no le tengas cariño pero que funcione bien con su mando a distancia.
· Para versión WiFi: Placa Arduino YUN
- Placa controladora de motores: driver 2 motores continua 4A 30V - L298
- Hilo de nailon.
Utilizados pero sustituibles:
- Retales de madera para la estructura interna del robot y chasis de la cabeza (lo podrías hacer en plástico o metal ligero).
- 2 x Ruedas acoplables a los motores.
- 2 x Ruedas de algún juguete.
- Canicas y bolas de ping pong (puedes cambiarlas por ruedas omnidireccionales de cualquier tipo).
- Cargador de portátil (cualquiera que dé al menos 12V de salida DC).
- Cables para montajes.
- 2 pesas de mancuerna (de 1,25 y 0,5 Kg) (Cualquier contrapeso o plomada).
- Pasta de fibra de vidrio (para reforzar la bola por dentro)
- 2 x Pletina de aluminio de 1cm de ancho (para reforzar la bola por dentro)
Opcionales:
- Una bola de árbol de navidad morada.
- Pinturas en spray.
- Un R2-D2 linterna LED (Esto será para la versión 2.5 con luces).
- pequeña placa de montaje.
- Alguna varilla para las antenas.
- Clavija de alimentación de un portátil viejo.
- Un interruptor reciclado.
- Cables, tornillos y demás.
Herramientas:
- Multiherramienta tipo Dremel con accesorios de corte y taladro
- Una pistola de silicona caliente
- Alicates - martillo - destornilladores - cutter - etc... una caja de herramienta normal
Y sobre todo... mucho paciencia y ganas de disfrutar con las dificultades que la realidad impone cuando estas construyendo algo por ti mismo... así es el DIY... y mucho amor por BB-8 !!!!!!


Imprescindibles:
- Globo terráqueo de 32cm de diámetro
- Globo terráqueo de 20cm de diámetro
- 2 x Motor: DC 37mm 50RPM, Voltaje nominal: 12V (Rango de Voltaje: 4,5V-15V) Velocidad nominal: 40 rpm Corriente nominal: 0,3 A Par nominal: 4,5 kg.cm
- Batería: batería de plomo 12V / 2,2AH dimensiones: 178 x 34 x 60mm
- 2 x Imanes: iman de neodimio - ANILLO Ø30 - Ø6 x 6 mm - N40 [Podrías utilizar reciclados de discos duros o de altavoces] [Para la versión 3.0 que moverá la cabeza harán falta 6]
- Control para el robot:
· Para versión radiocontrol: Un juguete radiocontrol al que no le tengas cariño pero que funcione bien con su mando a distancia.
· Para versión WiFi: Placa Arduino YUN
- Placa controladora de motores: driver 2 motores continua 4A 30V - L298
- Hilo de nailon.
Utilizados pero sustituibles:
- Retales de madera para la estructura interna del robot y chasis de la cabeza (lo podrías hacer en plástico o metal ligero).
- 2 x Ruedas acoplables a los motores.
- 2 x Ruedas de algún juguete.
- Canicas y bolas de ping pong (puedes cambiarlas por ruedas omnidireccionales de cualquier tipo).
- Cargador de portátil (cualquiera que dé al menos 12V de salida DC).
- Cables para montajes.
- 2 pesas de mancuerna (de 1,25 y 0,5 Kg) (Cualquier contrapeso o plomada).
- Pasta de fibra de vidrio (para reforzar la bola por dentro)
- 2 x Pletina de aluminio de 1cm de ancho (para reforzar la bola por dentro)
Opcionales:
- Una bola de árbol de navidad morada.
- Pinturas en spray.
- Un R2-D2 linterna LED (Esto será para la versión 2.5 con luces).
- pequeña placa de montaje.
- Alguna varilla para las antenas.
- Clavija de alimentación de un portátil viejo.
- Un interruptor reciclado.
- Cables, tornillos y demás.
Herramientas:
- Multiherramienta tipo Dremel con accesorios de corte y taladro
- Una pistola de silicona caliente
- Alicates - martillo - destornilladores - cutter - etc... una caja de herramienta normal
Y sobre todo... mucho paciencia y ganas de disfrutar con las dificultades que la realidad impone cuando estas construyendo algo por ti mismo... así es el DIY... y mucho amor por BB-8 !!!!!!

lunes, 25 de enero de 2016
BB-8 Casero V2.0
Ya tenemos lista la V2.0... el sueño se ha convertido en realidad. Nuestro BB-8 casero ya se maneja desde una página WEB accesible vía WiFi:
La placa principal del robot es una Arduino YUN. Hay que cargar el código arduino como tal y además la página web.
Para aprender cómo manejar esta tarjeta hay mucha información en internet, sobre todo me ha ayudado lo que se puede encontrar en estas páginas:
La placa principal del robot es una Arduino YUN. Hay que cargar el código arduino como tal y además la página web.
Para aprender cómo manejar esta tarjeta hay mucha información en internet, sobre todo me ha ayudado lo que se puede encontrar en estas páginas:
Aquí podéis descargar tanto el código final de Arduino YUN como la página web completa:
Además de cambiar el control del robot, hemos hecho estas dos pequeñas mejoras:
Upgrade 2.0 => 2.1:
Aceleración y deceleración suave con dos nuevos Pin PWM (9 y 10) conectados a los pin Enable de la placa drive de motores: Utilizando la tecnología PWM, que envía a través de una señal digital una señal analógica, hemos conseguido que las aceleraciones y deceleraciones de BB-8 sean progresivas, evitando balanceos.
Upgrade 2.1 => 2.2:
Voltímetro que permite medir la carga de la batería del robot: La batería principal del robot es de 12V y la placa arduino YUN tiene un voltaje recomendado de solo 5V. Mediante tres resistencias de 10K ohm conectadas en serie, y llevando la señal que hay entre la 1ª y la 2ª resistencia a una entrada analógica de la placa YUN, conseguimos saber el valor del voltaje de la batería principal ya que se divide el voltaje entre 3.
El robot ya se puede manejar desde cualquier PC, tablet o móvil que esté en la misma red local WiFi que el robot, o si estamos fuera de casa es el propio robot el que emite la red WiFi y el móvil o PC para controlarle debe conectarse a su red.
Con herramientas de control remoto para PCs, tipo TeamViewer se puede controlar desde cualquier lugar del mundo el PC que tiene acceso a controlar a BB-8, por lo que se puede manejar el robot desde cualquier lugar con acceso a internet.
El proyecto continúa. Siguiente paso V3.0: Instalar el móvil en la cabeza que permitirá que tenga cámara telepresencia, luz a través de la linterna del propio móvil y emitir los sonidos originales del robot y nuestra voz si hace falta , - ) ¡¡Seguiremos trabajando y disfrutando!!!
Quiero agradecer a las personas de todo el mundo que se han puesto en contacto conmigo a través de la redes sociales y este mismo blog para interesarse por el proyecto, para dar ánimos o incluso para ayudar en él como el señor Larry , - )
lunes, 21 de diciembre de 2015
¿Cómo hemos hecho a BB-8 casero V1.0?
Aquí tenéis un vídeo explicando cómo hemos fabricado nuestro BB-8 casero en su versión 1.0
Ha sido apasionante intentar algo así enfrentándote al mundo real. Cada paso en su construcción, cada decisión tomada con la incertidumbre de no saber si era acertada o no lo ha convertido en una aventura. No ha sido sencillo, ni fácil, y he tenido que aprender muchas cosas para poder hacerlo, pero es el primer robot que hago y no va a ser el último:
Ha sido apasionante intentar algo así enfrentándote al mundo real. Cada paso en su construcción, cada decisión tomada con la incertidumbre de no saber si era acertada o no lo ha convertido en una aventura. No ha sido sencillo, ni fácil, y he tenido que aprender muchas cosas para poder hacerlo, pero es el primer robot que hago y no va a ser el último:
Motores:
DC 37mm 50RPM. Voltaje nominal: 12V (Rango de Voltaje: 4,5V-15V) Velocidad nominal: 40 rpm Corriente nominal: 0,3 A Par nominal: 4,5 kg.cm
Batería:
Tensión: 12V
Capacidad nom. (20h): 2,2Ah
Corriente de carga máx.: 0.57A
Altura con conexiones: 66
Dimensiones: 178 x 34 x 60mm
Peso: 0.94kg
Placa controladora de motores:
Controlador de DC Dual Motor 30V 4A V2 permite conducir independientemente dos motores de corriente continua , controlando tanto la velocidad como la dirección. Se basa en el famoso circuito integrado L298, de STMicroelectronics. El L298 es un circuito monolítico integrado en un paquete PowerSO20.
Podéis preguntar cualquier duda o sugerencia. Saludos y que la fuerza os acompañe!!!
sábado, 19 de diciembre de 2015
Presentación pública de BB-8 en el estreno de Star Wars VII, El despertar de la fuerza.
Ya que hemos conseguido tener en marcha a BB8 antes del estreno de la película Star Wars VII y que lo prometido a mi hijo Sergio era que si lo conseguíamos lo llevaríamos al estreno ¡lo hemos hecho!!... hemos estado en los cines Kinepolis de Madrid, junto a las legiones de fans de la saga y lo hemos pasado estupendamente... El robot ha funcionado perfectamente y ha gustado mucho , - )
























Suscribirse a:
Entradas (Atom)